Определение глубины: Определение глубины
Индукционный метод поиска. Определение глубины залегания кабельной линии :: Ангстрем
Знание глубины залегания подземной коммуникации является необходимым условием для безопасного проведения различных земляных или ремонтных работ без риска повредить коммуникации. Индукционные трассоискатели позволяют решить эту задачу. Описанные ниже работы по определению глубины залегания коммуникаций можно производить, используя как активный (с применением генератора), так и пассивный методы.
Определение глубины залегания кабельной линии методом 45 градусов
Рассмотрим определение глубины залегания кабельной линии индукционными трассоискателями методом 45 градусов. Он основан на следующем: при перемещении наклоненной под углом 45° к горизонту катушки вдоль поверхности земли, наводимый в ней сигнал от кабеля будет изменяться согласно рис. 1. Антенна трассоискателя конструктивно выполнена в виде штанги, к концу которой прикреплена подвижная поисковая катушка, которая может фиксироваться под различными углами к оси штанги, в том числе и под углом 45°.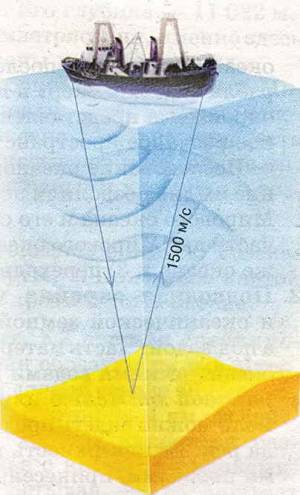
Определение глубины залегания кабельной линии производят в следующем порядке:
1. К кабельной линии подключают генератор. Варианты подключения могут быть различными.
Рис. 1 — Сигналы в поисковой катушке в зависимости от ее расположения относительно силовых линий магнитного поля2. Используя описанные в блоге методы при помощи приемника, находят трассу кабельной линии в том месте, где необходимо определить глубину ее залегания.
3. Располагают штангу приемника над местом залегания кабельной линии таким образом, чтобы ось поисковой катушки на конце штанги была перпендикулярна поверхности земли. Перемещаются со штангой приемника перпендикулярно трассе пролегания кабельной линии то в одном, то в другом направлении до тех пор, пока не будет найдено положение с минимальной громкостью сигнала. При этом необходимо выбрать такое положение штанги, при котором смещение в любую сторону приводит к одинаково резкому увеличению громкости.
 2 — Определение точного местонахождения трассы кабельной линии
2 — Определение точного местонахождения трассы кабельной линииОтмечают на поверхности земли точку 1 с минимальной громкостью сигнала генератора.
Располагают штангу антенны над точкой 1 таким образом, чтобы ее ось была перпендикулярна поверхности земли, а ось поисковой катушки лежала в плоскости, перпендикулярной оси кабеля под углом 45° к горизонту. Со штангой перемещаются от точки 1 перпендикулярно трассе кабельной линии сначала в одном, а затем в противоположном направлении до тех пор, пока не определят положения (точка 2 и точка 3) с минимальным уровнем сигнала.
Согласно рисунку 3 расстояние от точки 1 до точки 2 или 3 будет равно глубине залегания кабельной линии, т.е. выполняются равенства L1=L2, L1=h и L2=h, а также h=(L1+L2)/2.
Определение глубины залегания кабельной линии методом градиента сигнала
Существует более быстрый и простой способ определения глубины залегания кабеля.
Последовательность определения глубины состоит из двух шагов. Сначала фиксируют уровень сигнала в позиции антенны А1 (катушка на поверхности земли над кабелем, ось катушки перпендикулярна оси кабеля). Затем антенну, сохраняя ее ориентацию в пространстве, поднимают вверх в позицию А2, в которой уровень сигнала в два раза меньше первоначального. Расстояние по вертикали между двумя положениями катушки антенны равно глубине h залегания кабеля.
Максимальная глубина, определяемая этим методом ограничена максимальной высотой, на которую оператор может поднять вертикально вверх катушку антенны.
Рис. 4 — Метод градиента сигналаОсобенности определения глубины залегания при близком прохождении кабельных линий
Рассмотренная методика определения глубины залегания дает правильные результаты в том случае, когда силовые линии магнитного поля имеют форму концентрических окружностей, как показано выше. При этом расстояния от Точки 1 (над кабелем) до Точки 2 и Точки 3 с минимальным уровнем сигнала одинаковы или близки по величине. Если форма силовых линий магнитного поля искажена, то точное определение глубины залегания кабельной линии описанным выше методом затруднено.
При этом расстояния от Точки 1 (над кабелем) до Точки 2 и Точки 3 с минимальным уровнем сигнала одинаковы или близки по величине. Если форма силовых линий магнитного поля искажена, то точное определение глубины залегания кабельной линии описанным выше методом затруднено.
Искажение силовых линий магнитного поля имеет место, когда пути прохождения прямого и обратного токов кабеля расположены достаточно близко друг около друга. Например, если прямой ток протекает по одной жиле кабеля, а обратный — по другой жиле того же кабеля. Аналогичная ситуация возникает в случае, когда прямой ток протекает по одному исследуемому кабелю, а обратный — по второму проложенному близко к первому. Этот случай показан на рисунке 5. Из рисунка видно, что из-за искажения формы магнитного поля Точка 1’ смещена относительно места залегания обнаруживаемой кабельной линии, Точка 2’ и Точка 3’ несимметрично расположены относительно Точки 1, а также имеют место неравенства: L1’ ≠ L2, L1’ ≠ h, L2’ ≠ h и (L1’+L2’)/2 ≠ h.
Определение глубины от компании «Практик-НЦ»
Мир рыбаков разделился на две части с тех пор, как производители начали выпускать доступные современные эхолоты. Одни доказывают, что это неспортивное поведение, теряется, мол, та изюминка в рыбной охоте при эксплуатации прибора. Другие же демонстрируют прекрасный улов, научившись читать и распознавать всю информацию, которую передает гидролокатор.
Так что же такое на самом деле эхолот? Ненужный прибор на рыбалке или же надежный помощник, который удваивает шансы на хороший улов? Давайте разберемся по порядку, выяснив его основные функциональные задачи, технические характеристики. Подробнее об отечественных эхолотах.
Эхолот – это прибор, который помогает произвести разведку на местности, просканировав водоем, определив рельеф, структуру дна, возможное наличие рыбы. Это все равно, что бинокль для охотника. Он помогает разглядеть потенциальное место, определив размеры, вид добычи. Но ведь он не умоляет заслуг охотника при возвращении домой с добычей.
Да, можно ловить рыбу «на удачу»! Никто не спорит. Но вот только если хотите превратить рыбалку не просто в приятное времяпрепровождение, а еще вернуться домой с внушительным уловом, порадовав всю свою семью, то советуем приобрести качественный эхолот.
На что способен эхолот?
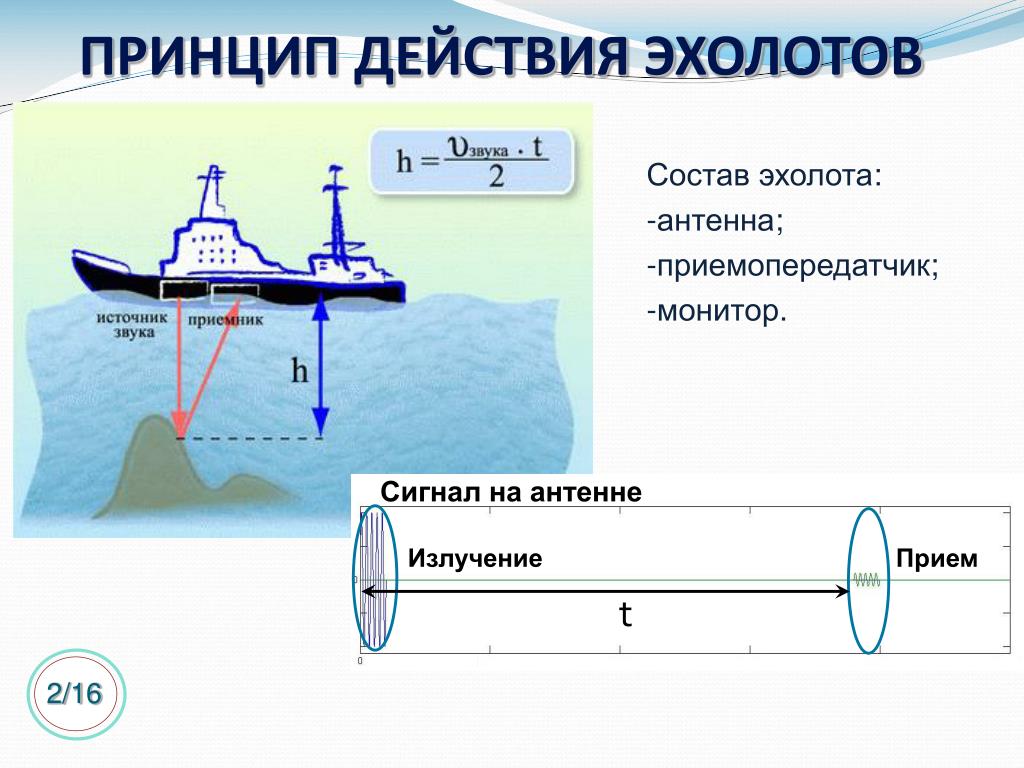
Начнем с того, что не следует ожидать от сонара больше того, что он может дать. Принцип работы построен на излучении датчиком ультразвука, который достигая препятствия, преобразовывается в электронные импульсы, выводимые в виде графических знаков на экран.
Новичку не так-то просто разобраться с изображением прибора. Это не телевизор, который вам продемонстрирует обстановку под водой.
- исследовать дно;
- определить плотность, структуру дна;
- рельеф;
-
возможное наличие рыбы.
Не попадитесь в ловушку!
Для того чтобы правильно считать информацию, выводимую на экран, нужно потренироваться и запомнить основные правила.- Информация в центре дисплея – это не то, что находится под лодкой под лункой). Это прошлые данные (т.е. были под датчиком 15-20 сек назад), которые понадобятся для сравнения, изучения.
- Правая часть экрана демонстрирует то, что происходит под лодкой практически в данный момент.
-
Гидролокатор не вещает в прямой трансляции, передает картинку с небольшим запозданием. Учитывайте это, наблюдая за рельефом, а также возможным поведением рыбы.

- Отсутствие штрихов, обозначающих рыбу, еще не означает, что ее нет. Ориентируйтесь на общие показания, анализируйте их.

Определяем глубину
Глубина эхолота – одна из самых распространенных, востребованных функций. И неудивительно, ведь порой зная глубину, можно четко выстроить стратегию дальнейшей рыбалки.Хорошо, если вы рыбачите в привычном знакомом месте, четко зная, какую рыбу можно встретить. А если водоем незнакомый, неизведанный, то вам не обойтись без таких сведений, как глубина, рельеф дна.
Все еще определяете глубину водоема старинным дедовским способом, забрасывая в воду грузила? Современный производитель сегодня предлагает надежного помощника, в виде сонара, который точно и в течение нескольких секунд определит требуемые параметры.
Если вам необходимо использовать сонар исключительно для определения глубины, то полезно будет переключить гидролокатор на специальный режим глубиномера. Это сэкономит массу времени, облегчив эксплуатацию. В данном режиме угол луча специально уменьшен, чтобы усилить мощность акустического сигнала. Это необходимо для наибольшей точности определения глубины.
В данном режиме угол луча специально уменьшен, чтобы усилить мощность акустического сигнала. Это необходимо для наибольшей точности определения глубины.
Режим позволяет:
- Измерить температуру воздуха и воды
- Точно определить глубину
- Определить глубину в затрудненных условиях
Возникает резонный вопрос, а какую глубину может зафиксировать гидролокатор? Все зависит, конечно, от типа устройства, мощности, количества лучей. Выбор оборудования обуславливает место и время вашей рыбалки. Например, отечественные эхолоты «Практик» могут с легкостью измерить водоем глубиной до 25 м, при этом точность измерений составляет ± 1 см для глубин 0,5-10 м и ±10 см для глубин 10-25 м.
Дальность сканирования до 25 метров неслучайно ограничена разработчиками. При таком расстоянии мощность акустического сигнала оптимальна и не отпугивает рыбу, а это одно из значимых преимуществ «Практика».
Все еще думаете, какой эхолот купить, чтобы качество надежное и цена доступная? Отечественные сонары ТМ Практик разработаны с учетом специфики местного климата и отлично справляются со своими функциональными задачами.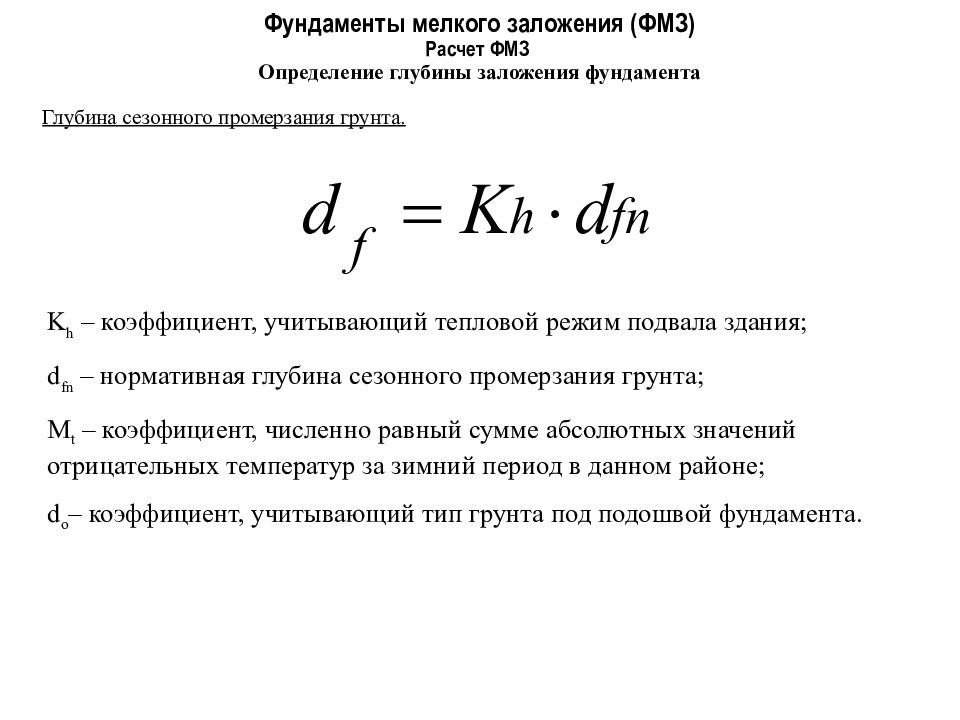 Небольшой вес, надежность, компактный размер делают их необременительным точным помощником на летней и зимней рыбной ловле. Эхолоты для рыбалки цена.
Небольшой вес, надежность, компактный размер делают их необременительным точным помощником на летней и зимней рыбной ловле. Эхолоты для рыбалки цена.
Остались вопросы? Звоните по телефону +7 (495) 514-11-73, наши специалисты подберут оптимальный вариант.
Камеры глубины. Опыт сканирования помещений. | by PHYGITALISM | PHYGITALISM
В основном, с RGB-D сенсоров в каждый момент времени можно получить следующие данные:
- Цветное изображение. Далее будем называть его RGB изображением.
- Карту глубины.
Карта глубины представляет собой двумерный массив чисел, чей размер может совпадать или не совпадать с размером RGB изображения — в самом простом случае, размеры одинаковые. Каждое число на карте глубины показывает расстояние от сенсора до точки в реальном мире, которая была спроецирована на плоскость камеры. Пример представлен на рис. 1. На рисунке присутствуют участки с чёрным цветом. Это означает, что информация о глубине неизвестна.
Рис. 1. Слева карта глубины. Справа RGB изображение.
Справа RGB изображение.Фактически, нам необходимо сделать то, что обычно делают в компьютерной графике, только в обратную сторону. В компьютерной графике — создают проекцию из 3D в 2D для отображения трёхмерной сцены на экране, а нашей задачей будет сделать проекцию из 2D в 3D. В общем случае, без дополнительной информации сделать это однозначно нельзя, но у нас есть информация с карты глубины.
Проецирование делится на два этапа:
- Выравнивание карты глубины с RGB изображением.
- Расчёт координат в 3D.
Зачем нужно выравнивание? Если мы хотим получить цветное “облако точек”, то информацию о реальном цвете можно взять только с RGB изображения. Как правило, камера, которая получает цветное изображение, и камера, которая анализирует глубину, находятся рядом с друг другом, но между ними все же есть небольшое расстояние. Для наглядности: на рис. 2 цифрой 1 обозначена камера, чувствительная к инфракрасному излучению(большинство RGB-D сенсоров используют её для определения глубины), а цифрой 2 обозначена RGB камера, которая передаёт цвет. Из-за смещения (расстояния между ними), пиксели на карте глубины и RGB изображении не будут соответствовать друг другу, следовательно необходима некоторая корректировка.
Из-за смещения (расстояния между ними), пиксели на карте глубины и RGB изображении не будут соответствовать друг другу, следовательно необходима некоторая корректировка.
Для этого нам понадобятся внешние параметры камеры (extrinsics). Получение этих параметров может отличаться в зависимости от SDK, используемого вместе с RGB-D сенсором. Мы рассмотрим пример на основе Intel RealSense SDK 2.0. Если у вас нет камеры RealSense, то ничего страшного — в SDK предусмотрена возможность воспроизводить специальные файлы в формате .bag, записанные заранее, так, как будто мы получаем данные с реальной камеры, но с некоторыми ограничениями по настройке. Для воспроизведения результатов достаточно загрузить пример, записанный на камеру SR300, и установить SDK 2.0. На момент написания использовался build 2.29.0.
После перехода по ссылке, для загрузки примера необходимо нажать на изображение:
Сначала попробуем просто сопоставить два изображения без выравнивания. Результат представлен на рис. 3.
Результат представлен на рис. 3.
Видно, что объекты не совпадают. Для визуализации значений глубины была использована цветовая схема Hue из SDK.
Попробуем воспользоваться встроенным в SDK механизмом выравнивания. Результат представлен на рис. 4.
Рис. 4. Сопоставление карты глубины и RGB изображения после выравнивания.Видно, что результат соответствует ожидаемому.
Технически это реализуется следующим образом: у каждой камеры своя система координат. Пусть у RGB камеры будет система координат с началом в точке A, у инфракрасной камеры система координат с началом в точке B.
Рис. 5. Система координат двух камер.То что мы видим на рис. 5— это проекция точки S в точку P на RGB изображении, и в точку P’ на карте глубины. Для построения проекции используется модель проективной камеры. Такая проекция описывается с помощью внутренних (intrinsics) параметров камеры. Например, если мы посмотрим на внутренние параметры камеры глубины из SDK с запущенным примером, то получим следующие значения(они могут отличаться в зависимости от калибровки):
width: 640, height: 480, ppx: 314.
 246, ppy: 245.973, fx: 475.647, fy: 475.647, model: 2, coeffs: [0.150283, 0.0176776, 0.00374443, 0.00247127, 0.143258]
246, ppy: 245.973, fx: 475.647, fy: 475.647, model: 2, coeffs: [0.150283, 0.0176776, 0.00374443, 0.00247127, 0.143258]Здесь приведены значения фокусных расстояний камеры fx, fy, координаты центра камеры ppx, ppy, модель дисторсии model и коэффициенты дисторсии coeffs.
В примере выше, вторая система координат (с началом в B) ещё и повёрнута на несколько градусов вокруг оси BZ’. В итоге, пиксели на одинаковых позициях карты глубины и RGB изображения, не соответствуют друг другу в реальности.
Для решения проблемы выравнивания нужно воспользоваться аппаратом линейной алгебры. Мы хотим узнать, какая точка в системе координат Axyz соответствует точке P’. Для этого необходимо:
- Спроектировать точку P’ обратно в 3D, в системе координат Bx’y’z’.
- Пересчитать координаты P’ в системе Axyz с помощью внешних параметров камеры.
- Спроектировать обратно на плоскость в системе Axyz.
Если посмотреть на внешние параметры камеры, то они имеют следующий вид (значения могут отличаться в зависимости от калибровки):
rotation: [0.
translation: [0.0257, -0.000733263, 0.00409536]
 999996, -0.00216331, 0.00187769, 0.0021743, 0.99998, -0.00586952, -0.00186496, 0.00587358, 0.999981]
999996, -0.00216331, 0.00187769, 0.0021743, 0.99998, -0.00586952, -0.00186496, 0.00587358, 0.999981]По названиям можно понять, что это значения матрицы поворота (rotation) между двумя системами координат и вектор переноса начала координат (translation). Пересчёт координат заключается в умножении на матрицу, если использовать однородные координаты.
Здесь мы приходим к проблеме обратного преобразования из 2D в 3D. Благодаря информации о глубине мы можем решить эту задачу.
В некоторых SDK для RGB-D сенсоров есть готовые функции — можно посмотреть как это сделано в RealSense SDK (rs2_deproject_pixel_to_point) или в Azure Kinect (k4a_transformation_depth_image_to_point_cloud). Конечно, некоторые детали были опущены, но это отображает основную идею (более подробно описано в [1]). На этом этапе мы можем получать “облако точек” вместе с цветом.
Посмотреть это можно в стандартном приложении Intel RealSense Viewer, которое входит в состав SDK, если перейти в режим 3D. Важно выбрать режим отрисовки точек (красная стрелка) как на рис. 6. Результат представлен на рис. 7.
Важно выбрать режим отрисовки точек (красная стрелка) как на рис. 6. Результат представлен на рис. 7.
Ультразвуковая диагностика рака языка. Определение глубины инвазии опухоли | АЛЛАХВЕРДИЕВА
1. Hubert Low TH, Gao R, Elliot M, Clark JR. Tumor classification for early oral cancer: re-evaluate the current TNM classification. Head Neck. 2015 Feb; 37(2):233–8. doi: 10.1002/hed.23581. Epub 2014 Mar.
2. J. Shah, S.G Patel. Head and Neck surgery and oncology. Mosby, Edinburg, 2007, p.731.
3. Pinto FR, de Matos LL, Palermo FC, Kulsar MA, Cavalheiro BG, de Mello ES, Alves VA, Cernea CR, Brandao LG. Tumor thickness as an independent risk factor of early recurrence in oral cavity squamous cell carcinoma. Eur Arch Otorhinolaryngol. 2014 Jun; 271(6):1747–54. Doi: 10.1007/s00405–013–2704–9. Epub 2013 Sep 27.
Eur Arch Otorhinolaryngol. 2014 Jun; 271(6):1747–54. Doi: 10.1007/s00405–013–2704–9. Epub 2013 Sep 27.
4. Ariji Y, Goto M, Fukano H, Sugita Y, Izumi M, Ariji E. Role of intraoral Doppler sonograhpy in predicting delayed cervical lymph node metastasis in patients with early-stage tongue cancer: a pilot study. Oral Surg Oral Med Oral Pathol Oral Radiol. 2015 Fed;119(2):246–53. doi: 10.1016/j.oooo.2014,10.21. Epub 2014 Nov 11.
5. Joshi PS, Pol J, Sudesh AS. Ultasonography – A diagnostic modality foe oral and maxillofacial diseases. Conmet Clin Dent. 2014 Jul; 5(3):345–51. doi: 10.4103/0976–237X. 137942.
6. Trojanowska A., Grzycka-Kowalczyk L., Trojanowski P. et al. Computed tomography perfusion examination is helpful in evaluating the extent of oropharyngeal and oral cavity cancer. Pol J Radiol 2011;76(1):14–9.
Pol J Radiol 2011;76(1):14–9.
7. Dogan E., Sarioglu S., Ada E. et al. Comparison of clinical and pathological staging in oral cavity cancers. Kulak Burun Bogaz Ihtis Derg 2012;22(6):305–10.
8. Rumboldt Z., Al-Okaili R., Deveikis J. P. Perfusion CT for head and neck tumors: pilot study. Am J Neuroradiol 2005;26(5):1178–85.
9. С. О. Степанов, Л. А. Митина, В. В. Ратушная, Д. В. Долгачева, В. А. Соловьев Ультрасонографическая диагностика рака языка, Head and Neck/Голова и шея. Российское издание № 3 / 2013: 5–7.
10. Lwin C. T., Hanlon R., Lowe D. et al. Accuracy of MRI in prediction of tumour thickness and nodal stage in oral squamous cell carcinoma. Oral Oncol 2012;48(2):149–54.
11. Keberle M., Jenett M., Hahn D. Clinical trial on the accuracy of a freehand and sensor-independent three-dimensional power Doppler ultrasound system measuring diameters, volumes and vascularity of malignant primaries of the neck. Ultraschall Med 2001; 22(2):91–95.
12. Kumar N, Patel MD. Pattern of lymphatic metastasis in relation to the depth of tumor in oral tongue cancers: a clinic pathological correlation. Indian J Otolaryngol Head Neck Surg.2013 Jul; 65(Suppl1): 59–63.doi: 10.1007/ы12070–012–0504-y. Epub 20.
В России предложен метод расчёта глубины промерзания почвы по спутниковым данным
Российские исследователи разработали новую методику, которая позволяет рассчитывать глубину промерзания почвы по данным дистанционного зондирования Земли.
Отмечается, что вечная мерзлота, морские льды, снежные и ледяные покровы, континентальные ледниковые щиты, горные ледники и системы ледяных облаков являются ключевыми компонентами криосферы Земли. Её изучение имеет большое значение для решения задач, связанных с изменением климата, региональными водными ресурсами и изменением уровня моря.
Её изучение имеет большое значение для решения задач, связанных с изменением климата, региональными водными ресурсами и изменением уровня моря.
Одной из задач, которые приходится решать при исследовании криосферы, является определение глубины промерзания почвы. Однако непосредственные измерения этого показателя не всегда возможны в силу удалённости и труднодоступности изучаемых областей. Выходом в этой ситуации может стать дистанционное зондирование при помощи спутников.
Новый метод разработали специалисты из Института космических исследований РАН, Института водных и экологических проблем СО РАН и Московского физико-технического института.
Речь идёт об использовании спутниковой микроволновой радиометрии. Российские учёные выяснили, что одинаковые значения данных со спутника могут соответствовать разной глубине промерзания почвы. На это влияет способность почвы к микроволновому излучению, которая может меняться в зависимости от влажности, засоленности, состава и других характеристик. Кроме того, было установлено, что однократные измерения с помощью радиометрии не могут дать точных результатов.
Кроме того, было установлено, что однократные измерения с помощью радиометрии не могут дать точных результатов.
В итоге была разработана специальная модель излучения, учитывающая характеристики почвы. Она используется вместе с ежедневными рядами дистанционных измерений тепловых излучений.
«Этот метод имеет ряд преимуществ. Среди них получение данных с обширных площадей, большая частота наблюдений в высоких широтах, независимость сбора данных от солнечной освещённости и атмосферных условий, чувствительность к подповерхностным процессам, а также относительная дешевизна», — говорят учёные.
Если вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER.
Определение глубины заложения фундамента, Расчет глубины заложения фундамента, Как определить глубину заложения фундамента
В данной статье мы рассмотрим расчет глубины заложения фундамента для частного дома, согласно указаниям СП «Основания зданий и сооружений».
Глубина заложения фундаментов зависит от многих факторов, таких как рельеф поверхности, инженерно-геологические условия площадки под строительство, конструктивные особенности дома, глубина промерзания грунтов, глубина расположения подземных вод и другое.
Важность инженерно-геологических изысканий бесспорна, но для многих частных застройщиков эта процедура является дорогостоящей. Наши статьи будут ориентированы на людей, которые в силу каких-либо причин не могут себе позволить нанять геологов и проектировщиков, но желающих на готовых примерах разобраться с расчетами оснований, а также других элементов своего будущего дома.
Итак, приступим.
Задача:
Определить глубину заложения фундамента в г.Москва. Рассмотрим несколько вариантов: неотапливаемый дом; отапливаемый дом без подвала с температурой в помещениях 20оС и отапливаемый дом с неотапливаемым подвалом.
Решение:
1. Первым делом нам нужно определить нормативную глубину сезонного промерзания грунтов (dfn), в метрах, которая определяется по формуле:
где d0 — величина, в метрах, для:
— глин и суглинков — 0,23
— мелких и пылеватых песков, супесей — 0,28
— песков гравелистых, крупных и средней крупности — 0,3
— крупнообломочных грунтов — 0,34
Для неоднородного сложения грунтов d0 определяется как средневзвешенное в пределах глубины промерзания.
Mt — коэффициент, равный сумме абсолютных значений среднемесячных отрицательных температур за зиму в данном районе, принимаемых по таблице 5.1 СП «Строительная климатология»
Для Москвы:
Месяцы | Год | |||||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
-7,8 | -7,1 | -1,3 | 6,4 | 13,0 | 16,9 | 18,7 | 16,8 | 11,1 | 5,2 | -1,1 | -5,6 | 5,4 |
Определяем Mt:
Mt=7,8+7,1+1,3+1,1+5,6=22,9
Тогда нормативная глубина промерзания для Москвы, где преобладают глины и суглинки, составит:
dfn=0,23 √22,9= 1,1м
Если вы не знаете, какие грунты залегают на вашем участке, то возьмите обычный ручной бур, который продается в строительных магазинах, и пробурите 1 отверстие в центре, а лучше 4 по углам будущей постройки. В основном на территории РФ встречаются именно пучинистые суглинки и глины. В СНиПе 1962 года не было величины d0 , вместо него было одно значение 23см, т.е. 0,23 метра, поэтому не будет грубой ошибкой, если вы примете именно ее.
2. После того, как определили нормативную глубину промерзания, необходимо вычислить расчетную глубину промерзания (df).
Для этого используется формула:
kh для наружных и внутренних фундаментов неотапливаемых зданий равен 1,1, кроме районов с отрицательной среднегодовой температурой. В нашем случае годовая температура +5,4о. Если у вас будет отрицательная годовая температура, то расчетную глубину промерзания для неотапливаемых зданий необходимо определять по СНиП «Основания и фундаменты на вечномерзлых грунтах».
kh для отапливаемых зданий определяется по таблице:
Особенности сооружения | Коэффициент kh при расчетной среднесуточной температуре воздуха в помещении, примыкающем к наружным фундаментам, оС | ||||
0 | 5 | 10 | 15 | 20 и более | |
Без подвала, с полами устраиваемыми: | |||||
по грунту | 0,9 | 0,8 | 0,7 | 0,6 | 0,5 |
на лагах по грунту | 1,0 | 0,9 | 0,8 | 0,7 | 0,6 |
по утепленному цокольному перекрытию | 1,0 | 1,0 | 0,9 | 0,8 | 0,7 |
С подвалом или техническим подпольем | 0,8 | 0,7 | 0,6 | 0,5 | 0,4 |
Примечание: В отапливаемых зданиях с холодным подвалом с отрицательной среднезимней температурой kh=1
Считаем расчетную глубину промерзания:
— неотапливаемое в зимний период здание df= 1,1*1,1= 1,21м. Округляем в большую сторону и принимаем df=1,25м
— отапливаемое здание без подвала, с полами по утепленному цокольному перекрытию: df= 0,7*1,1= 0,77м. Принимаем df=0,8м
— отапливаемое здание с холодным подвалом с отрицательной температурой df= 1*1,1= 1,1м. Принимаем 1,1м.
3. Определяем глубину заложения фундамента по условиям недопущения морозного пучения по таблице ниже, в зависимости от расположения уровня грунтовых вод (УВГ).
Грунты под подошвой фундамента | Глубина заложения фундаментов в зависимости от глубины расположения подземных вод dw , м, при | |
dw ≤ df+2 | dw > df+2 | |
Скальные, крупнообломочные с песчаным заполнителем, пески гравелистые, крупные и средней крупности | не зависит от df | не зависит от df |
Пески мелкие и пылеватые | не менее df | то же |
Супеси с показателем текучести IL<0 | то же | то же |
То же, IL>0 | то же | не менее df |
Суглинки, глины, а также крупнообломочные с глинистым заполнителем при показателе текучести грунта или заполнителя IL≥0,25 | то же | не менее df |
То же, IL<0,25 | то же | не менее 0,5df |
Так как без инженерно-геологических изысканий мы не можем знать глубину расположения грунтовых вод, то принимаем наихудший вариант: не менее df
Соответственно, для неотапливаемого здания d=1,25
Для отапливаемого здания без подвала с полами по утепленному перекрытию d=0,8м
Для отапливаемого дома с холодным подвалом d=1,1м
Теперь и вы знаете, как определить глубину заложения фундамента. Если будут вопросы, замечания и предложения, пишите в комментариях ниже.
После определения глубины заложения фундамента переходим к расчету оснований по второй группе предельных состояний — по деформациям. Об этом будет написана отдельная страница. Чтобы не пропустить выход новой статьи, подпишитесь на рассылку.
← Предыдущая Следующая →Статья была для Вас полезной?
Оставьте свой отзыв в комментарии
Как проверить глубину скважины после бурения?
При бурении скважины важным показателем является ее глубина. В первую очередь, она необходима для того, чтобы просчитать точную сумму за услуги по бурению. Учитывается стоимость каждого метра.
Если Вам достался участок со скважиной, но найти документы на неё нет никакой возможности, глубину придется проверять самостоятельно. Другой вариант – обратиться за помощью к специалистам за каротажем.
Определение глубины скважины после бурения
Сориентироваться, какая будет предварительная глубина скважины еще до начала буровых работ, всегда можно обратившись к открытым источникам – картам глубин артезианских скважин, их сейчас большое множество в интернете.
Более точные данные удастся получить после оборудования скважины. Провести проверку можно несколькими методами. Они отличаются сложностью, доступностью и точностью. Буровые мастера, как правило, замеряют глубину скважины подсчетом буровых штанг. Процесс выглядит следующим образом: в скважину до самого дна опускаются буровые штанги, и, в присутствии заказчика, происходит их подъем. Далее длина штанги умножается на их количество.
Механический способ
Заранее потребуется подготовить трос, груз из металла и рулетку. Груз крепится к тросу и опускается в скважину до уменьшения натяжения. Дальше шнур поднимают наверх и измеряют рулеткой мокрую часть веревки. Полученные показатели являются глубиной статического уровня воды, вся длина веревки и есть глубина скважины. Чтобы выполнить замеры, лучше взять гидрогеологическую рулетку, которая представляет собой пластичную линейку с утяжелителем на конце.
замер глубины скважины
К минусам данного способа относится невозможность определения динамического уровня воды при работающем насосе. Тем не менее, это неплохой способ самостоятельно проверить глубину скважины.
Магнитный вариант или каротаж
Этот вариант чаще всего используют при определении глубины источника водоснабжения. Магнитный способ позволяет получить точную информацию о нахождении водоносного горизонта.
В процессе измерения применяется геофизический электрический кабель. Устройство оснащено магнитными метками. Проведение операции аналогично механическому методу, но здесь процесс улучшен благодаря считывающему устройству. Метки на кабеле нанесены с определенным интервалом. На приемное устройство передается информация об их нахождении, благодаря чему удается точно знать, где расположен груз в конкретный момент. Между метками располагаются ролики, которые способствуют более точному определению глубины источника.
каротаж скважины
Акустический прием
Акустический глубиномер позволяет получить максимально точные показатели. Это профессиональный инструмент, который активно используется при добывании полезных ископаемых. Единственный минус – это высокая цена оборудования.
Глубина определяется промежутком времени от подачи до принятия сигнала. Полученные показатели обязательно вносят в паспорт скважины. Этот способ используется профессионалами, но механический и магнитный варианты доступны и любителям.
Если у Вас остались вопросы, как проверить глубину скважины, звоните, с радостью ответим!
Определение глубины — обзор
3.1 Телесейсмические исследования явлений умеренного размера (M ~ 5-6)
Сегодня все еще прилагаются значительные усилия к «калибровке траектории» поверхностных волн, в частности, в рамках исследований ДВЗЯИ (например, Stevens и Маклафлин, 2000). Однако было разработано несколько методов для работы с малоизвестными эффектами трассы с конкретными приложениями для изучения умеренных землетрясений, для которых на телесейсмических расстояниях получаются хорошие записи отношения сигнал-шум для поверхностных волн в течение 20–100 секунд.В этом случае длительностью источника и направленностью можно пренебречь, поскольку их влияние существенно только на более коротких периодах. Стандартная процедура заключается в использовании «эталонного события», для которого независимо был получен надежный механизм, для получения поправок на траекторию к конкретным станциям. Эти поправки на траекторию затем используются для определения параметров источника других интересующих соседних событий. Следуя подходу Weidner и Aki (1973), Паттон (1977) разработал итерационный метод для одновременного определения глубины, механизма источника и эффектов распространения для группы близко расположенных событий, наблюдаемых телесейсмически.Предполагается, что на пути к данной станции эффекты распространения одинаковы для всех событий. На смежных этапах процедуры попеременно улучшаются эффекты пути и характеристики источника. На этапе улучшения источника линейная система в M ij [Eqs. (4) и (5)] решается последовательно для различных значений глубины, и объявляется решение, соответствующее глубине, которая обеспечивает наилучшее качество данных в смысле наименьших квадратов. Мнимые части уравнений.(4) и (5) обычно не влияют на определение глубины, так как для неглубоких землетрясений собственные функции, соответствующие элементам тензора момента M xz и M yz , очень малы. (и уйти в ноль на свободной поверхности). Это также приводит к плохим ограничениям на эти два элемента тензора момента для неглубоких ( ч <20 км) землетрясений, если используются только поверхностные волны основной моды.
Метод Паттона (1977) ограничен тем фактом, что он требует, чтобы несколько землетрясений, расположенных в одном районе, были хорошо зарегистрированы телесейсмическими методами на одном и том же наборе станций.Более того, Аки и Паттон (1979) показали, что для получения надежных решений тензора момента из данных в диапазоне периодов 20–100 с необходимо знать средние фазовые скорости на трассах станций-источников с точностью 0,5%. Когда корректировки траектории в фазе неточны, метод не работает, потому что невозможно определить четкий минимум на кривых невязок / глубины. С другой стороны, поскольку влияние траектории на амплитуды менее когерентно, модели среднего значения Q достаточно, если используются только данные об амплитуде (Mendiguren, 1977).Цай и Аки (1971) впервые показали, как амплитудный спектр волн Рэлея (и, в меньшей степени, волн Лява) содержит сигнатуру глубины источника в диапазоне периодов 10–100 с в виде «дыры» в спектр, который появляется в данный период для определенного механизма источника. Однако, когда используются только амплитуды, обратная задача становится нелинейной по тензору момента, что требует знания разумного начального решения.
Процедура, которая значительно ослабляет ограничение точных поправок на траекторию в фазе, была предложена Романовичем (1982a) на основе следующего наблюдения: для данного источника и на данной частоте ω k, действительное (α ) и мнимой (β) части в уравнениях.(4) и (5) являются функциями только азимута θ и могут быть записаны в виде
(9) α (ωk, θ) = Ak + Bkcos2θ + Cksin2θβ (ωk, θ) = Dkcosθ + Eksinθ
, где A k, B k, 6 9000 k, D k, и E k, зависят от частоты. В силу уникальности разложения Фурье непрерывных функций на каждой частоте ω k, с заданным набором значений α и β для разных азимутов θ эти коэффициенты определяются однозначно.Разложения Фурье α и β по азимуту содержат другие коэффициенты степени n > 2, которые возникают из-за неполного знания поправок на траекторию. При решении уравнений В (9) эти другие члены исключаются. Таким образом, необходимо точно знать только очень длинноволновые ( n ≤ 2) условия «карты» фазовой скорости в области, содержащей источники и станции, что сегодня становится все более достижимой благодаря улучшениям в глобальной томографии поверхностных волн.
Таким образом, процедура инверсии состоит из «двух шагов»: во-первых, уравнения.(9) решаются на наборе частот ω 1 ,…, ω k, и, во-вторых, следующая система уравнений решается для глубины ч, поиск , как и ранее, минимума в невязки / кривая глубины. Так, например, для волн Рэлея:
(10) Ak = 12Sr (ω, h) MzzBk = 12Pr (ω, h) (Myy − Mzz) Ck = −Pr (ω, h) MxyDk = Qr (ω, h) MxzEk = Qr (ω, h ) Myz
Здесь мы предположили, что в источнике нет изменения объема, поэтому Σ i M ii = 0 и M xx + M yy заменяется на — M zz в формуле.(2). Хотя это предположение оправдано для большинства землетрясений, его необходимо ослабить при поиске объемной составляющей источника. Для решения последнего требуются многомодовые наблюдения, и уравнения. (2) — (8) показывают, что разрешение M xx, M yy, и M zz, по отдельности включает в себя множество компромиссов со структурными эффектами (например, Дюфумье и Ривера, 1997). Романович (1982a) показал, что эта процедура позволяет определять точные параметры источника для небольших событий ( M <5.5), для которого телесейсмическими методами доступны только наблюдения за поверхностными волнами, при условии, что доступно одно событие большей магнитуды с хорошо ограниченным механизмом в области источника с апертурой ~ 1500 км. Позднее этот метод был распространен на нелинейную инверсию данных об амплитуде поверхностных волн (Romanowicz and Suarez, 1983).
Определение глубины мелководных телесейсмических землетрясений: методы и результаты (Документ 6R0367)
Аннотация
Глубины неглубоких землетрясений средней силы могут быть определены в обычном порядке с точностью до нескольких километров с использованием одних только телесейсмических данных, что позволяет определять вертикальные положения землетрясений в литосфере.Эта возможность предоставляет ценный инструмент для изучения тектонических плит, поскольку глубины землетрясений могут использоваться для ограничения термической и механической структуры литосферы на границах плит и во внутриплитных областях. Для анализа глубины используются два основных метода. Спектры поверхностных волн можно использовать для определения глубины фокуса, поскольку возбуждение моды отражает поведение собственных функций с глубиной. Основное ограничение таких исследований связано с латеральной неоднородностью скоростной структуры. Формы объемных волн также позволяют определить фокусную глубину, которая контролирует временное разделение между прямым приходом и отражениями от поверхности вблизи источника.Эти исследования могут быть ограничены частичным компромиссом между глубиной и длительностью функции времени источника. Надежность широко используемого в настоящее время подхода к моделированию объемной волны демонстрируется отличным согласованием глубин, определенных разными исследователями с использованием разных алгоритмов. Определение глубины устойчиво к типичным неопределенностям в механизме очага и структуре около источника. Компромисс с продолжительностью функции времени источника обычно не создает серьезных трудностей для небольших событий (M s <6.5). Для более крупных событий компромисс может быть решен с использованием подхода, в котором для заданной глубины функция времени, обеспечивающая наилучшее соответствие набору сейсмограмм, находится путем деконволюции. Деконволюция на серии глубин дает функцию несоответствия, минимум которой указывает глубину фокуса. Тесты с синтетическими данными показывают, что процесс деконволюции дает надежные оценки глубины даже с учетом неопределенностей в механизме очага и структуре около источника. Он успешно справляется с несколькими источниками, конечными источниками среднего размера и горизонтально распространяющимися разрывами.Хорошие результаты получаются для вертикально распространяющихся разрывов до тех пор, пока область разлома не станет настолько большой, что формы волны значительно отличаются от приближения точечного источника. В результате исследований с использованием этих методов определения глубины был получен ряд важных тектонических результатов. Максимальная глубина океанической внутриплитной сейсмичности увеличивается с возрастом литосферы и приблизительно ограничена изотермой 750 ° C. Эта глубина примерно равна изгибной толщине литосферы, но намного меньше глубины зоны низких скоростей, на которую указывает дисперсия поверхностных волн.Максимальная глубина континентальной внутриплитной сейсмичности также ограничена температурой, но более низкой температурой. Эти наблюдения согласуются с быстрым ослаблением соответствующих горных пород с глубиной, предсказанной стандартными зависимыми от температуры реологиями. Максимальная глубина трансформной сейсмичности океана соответствует изотерме около 400 ° C. Эта температура ниже, чем можно было бы спрогнозировать на основании результатов внутрипластинного анализа, и может указывать на то, что преобразования являются более горячими или более слабыми, чем ожидалось.Глубины гребневых землетрясений хребта, достаточные для телесейсмического анализа, чрезвычайно малы (0-8 км). Распределение сейсмичности по глубине в областях континентальных нормальных разломов накладывает ограничения на природу процесса расширения. В зонах субдукции точные определения глубины могут разрешить верхнюю и нижнюю области изгиба в изгибающейся опускающейся плите, точно определить границу раздела плит и составить карту вертикальной протяженности и положения разломов при сильных землетрясениях.
Неинвазивное определение глубины включения в биологические ткани с помощью пространственно-сдвинутой рамановской спектроскопии с внешней калибровкой
Рамановская спектроскопия с пространственным смещением (SORS) позволяет определять химические характеристики биологических тканей на глубинах до двух порядков больше, чем обычная рамановская спектроскопия.В этом исследовании мы демонстрируем использование SORS для неинвазивного прогнозирования глубины включения в мутной среде (, например, биологических тканей), используя только наборы данных внешней калибровки, тем самым расширяя наш предыдущий подход, который требовал внутренней калибровки. Как и в случае с предыдущей методологией, концепция основана на относительных изменениях интенсивностей рамановских полос включения, которые напрямую связаны с длиной пути рамановских фотонов, проходящих через среду, тем самым кодируя информацию о глубине включения.Однако здесь калибровочная модель создается с использованием данных только внешних измерений, выполненных на поверхности ткани. Этот новый подход обеспечивает полностью неинвазивную методологию, потенциально применимую к in vivo медицинской диагностике без каких-либо знаний a priori . Моделирование распространения фотонов методом Монте-Карло использовалось для понимания взаимосвязи между пространственным смещением и длиной пути фотонов внутри тканей, что позволило вывести общий коэффициент масштабирования, позволяющий использовать измерения пространственного смещения для предсказания глубины.Подход был подтвержден путем прогнозирования глубины наночастиц (НЧ), меченных поверхностно-усиленным комбинационным рассеянием (SERS), действующих как включения внутри пластины из ex vivo свиной ткани, что дало среднеквадратичную ошибку прогноза 7,3% относительно общая толщина ткани. Наши результаты открывают путь для будущей неинвазивной глубокой рамановской спектроскопии in vivo , позволяя, например, локализовать раковые поражения или биомаркеры рака для ранней диагностики заболеваний и целевого лечения.
Эта статья в открытом доступе
Подождите, пока мы загрузим ваш контент… Что-то пошло не так. Попробуй еще раз?Произошла ошибка при настройке пользовательского файла cookie
Этот сайт использует файлы cookie для повышения производительности. Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера для приема файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались. Чтобы принять файлы cookie с этого сайта, нажмите кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie. Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в файле cookie может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта. Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
Определение абсолютной и относительной глубины очага землетрясений средней силы: пример из последовательности землетрясений 2010 г. Эль-Майор-Кукапа
Определение абсолютной и относительной глубины очага землетрясений средней силы: пример из последовательности землетрясений 2010 г. Эль-Майор-Кукапа
Чуньцюань Ю, Эгилл Хаукссон, Чжунвен Чжан, Элизабет С.Кокран и Дональд В. ХелмбергерПредставлено 14 августа 2018 г., Вклад SCEC № 8520, Плакат ежегодного собрания SCEC 2018 № 056
Глубина очага землетрясения является ключевым параметром для понимания геометрии зон разломов, реологии литосферы и тектоника континентов. Это также важно для оценки сейсмической опасности. Обычное определение глубины очага землетрясения зависит от времени прохождения основных фаз объемной волны. Он хорошо работает при наличии плотной близлежащей сейсмической сети, но неопределенность значительно возрастает по мере увеличения расстояния до ближайшей станции.Однако точную фокусную глубину можно определить, если идентифицировать фазы региональной глубины вместе с их эталонными фазами. Дифференциальное время прохождения между фазой глубины и ее эталонной фазой, которая наиболее чувствительна к глубине фокуса, может быть определено с помощью моделирования региональной формы волны. Мы демонстрируем нашу процедуру, используя данные последовательности землетрясений 2010 г. Mw 7.2 El Mayor-Cucapah (M> 4.0). Фокусные глубины для этой последовательности землетрясений были плохо определены в каталоге Южной Калифорнии, поскольку они расположены рядом с краем или за пределами сейсмической сети Южной Калифорнии.Мы определяем абсолютную глубину ~ 30% всех землетрясений с M> 4.0 (122) в этой последовательности, используя региональное моделирование волновых форм. Для других событий со слабыми или сложными фазами на глубине мы дополнительно разрабатываем метод относительного перемещения с использованием дифференциального времени прохождения Pn в дополнение к дифференциальному времени прохождения Pg и Sg. Включение дифференциального времени пробега Pn значительно снижает неопределенность оценки относительной глубины. В целом, мы можем определить глубину фокуса около ~ 75% от 122 M> 4.0 событий. Наши результаты показывают плотное распределение по глубине последовательности землетрясений 2010 г. Эль-Майор-Кукапа, большинство из которых расположено на расстоянии 3–10 км. Распределение глубин этих землетрясений аналогично глубинам очагов, определенным с помощью временной сейсмической сети. Относительно небольшой диапазон глубин соответствует ожиданиям от высоких поверхностных тепловых потоков.
Цитирование
Ю., К., Хаукссон, Э., Жан, З., Кокран, Э. С., и Хелмбергер, Д. В. (2018, 08). Определение абсолютной и относительной глубины очага землетрясений средней силы: пример из последовательности землетрясений 2010 года Эль-Майор-Кукапа.Стендовая презентация на ежегодном собрании SCEC 2018.
Связанные проекты и рабочие группы
Сейсмология
Определение глубины хромофоров в коже человека методом импульсной фототермической радиометрии.
AbstractМы сообщаем о применении импульсной фототермической радиометрии (PPTR) для определения глубины подповерхностных хромофоров in vitro и in vivo в биологических материалах. Измерения, обеспечиваемые PPTR, в сочетании с неотрицательным ограниченным алгоритмом сопряженного градиента используются для определения начального распределения температуры в биологическом материале сразу после импульсного лазерного излучения.В пределах экспериментальной ошибки, глубина хромофора (50-450 мкм) в 55 фантомах коллагена in vitro, определенная с помощью PPTR и оптической низкокогерентной рефлектометрии, эквивалентна. Глубина кровеносных сосудов с винными пятнами, определенная с помощью PPTR, очень хорошо коррелирует с их местоположением, обнаруженным при компьютерном микроскопическом наблюдении гистологических срезов. Средняя глубина кровеносных сосудов, рассчитанная на основе PPTR и гистологического наблюдения, статистически неразличима (p> 0,94).
Многие научные публикации, созданные UC, находятся в свободном доступе на этом сайте из-за политики открытого доступа UC.Сообщите нам, насколько этот доступ важен для вас.
Основное содержимоеЗагрузить PDF для просмотраПросмотреть больше
Больше информации Меньше информации
Закрывать
Введите пароль, чтобы открыть этот PDF-файл:
Отмена ОК
Подготовка документа к печати…
Отмена
Определение оптической глубины аэрозоля в УФ-диапазоне с помощью четырехканального прецизионного радиометра с фильтром
Исследовательская статья 9 марта 2017 г.
Исследовательская статья | 9 марта 2017 г.
Томас Карлунд 1, a , Наталья Куремети 1 , Стелиос Казадзис 1,2 и Юлиан Грёбнер 1 Thomas Carlund et al.Томас Карлунд 1, a , Наталья Куремети 1 , Стелиос Казадзис 1,2 и Юлиан Грёбнер 1- 1 Physikalisch-Meteorologisches Observatorium Davos / Всемирный радиационный центр (PMOD / WRC), Dorfstrasse 33, 7260 Davos Dorf, Швейцария
- 2 Институт экологических исследований и устойчивого развития Национальной обсерватории Афин, Афины, Греция
- a от 1 апреля 2017 г. по адресу: Департамент информации и статистики, Шведский метеорологический и гидрологический институт, 60176 Norrköping, Швеция
- 1 Physikalisch-Meteorologisches Observatorium Davos / Всемирный радиационный центр (PMOD / WRC), Dorfstrasse 33, 7260 Davos Dorf, Швейцария
- 2 Институт экологических исследований и устойчивого развития Национальной обсерватории Афин, Афины, Греция
- a от 1 апреля 2017 г. по адресу: Департамент информации и статистики, Шведский метеорологический и гидрологический институт, 60176 Норрчёпинг, Швеция
Для корреспонденции : Томас Карлунд ([email protected], [email protected])
Скрыть данные об авторе Получено: 4 ноября 2016 г. — Начало обсуждения: 16 декабря 2016 г. — Исправлено: 23 февраля 2017 г. — Принято: 24 февраля 2017 г. — Опубликовано: 9 марта 2017 г.Определение свойств аэрозоля, особенно оптической толщины аэрозоля (AOD) в ультрафиолетовом (УФ) диапазоне длин волн, имеет большое значение для понимания климатологической изменчивости УФ-излучения.Однако оперативное извлечение АОТ на наиболее вредных с биологической точки зрения длинах волн УФ-В в настоящее время производится лишь в очень немногих местах. В этой статье рассказывается о солнечном фотометре UVPFR (прецизионный УФ-радиометр), стабильном и надежном приборе, который можно использовать для поиска AOD на четырех длинах волн УФ-излучения. Были представлены характеристики приборов и результаты калибровок Лэнгли на большой высоте. Было показано, что из-за относительно широких спектральных функций отклика UVPFR калибровочные константы ( V 0 ), полученные из калибровок графика Лэнгли, недооценивают истинные внеземные сигналы.Соответственно, были введены поправочные коэффициенты. Кроме того, функции спектрального отклика прибора также приводят к очевидному зависящему от воздушной массы уменьшению оптической толщины озона, используемой при определении АОТ. Поэтому была введена скорректированная формула для расчета AOD с поправочным членом, зависящим от общего количества озона в столбе и воздушной массы озона. Калибровка Лэнгли, выполненная с интервалом 13–14 месяцев, привела к изменению чувствительности ≤1,1%, что свидетельствует о хорошей стабильности прибора.Сравнение с высокоточным радиометром со стандартным прецизионным фильтром, измеряющим АОТ на длинах волн 368–862 нм, показало стабильные результаты. Кроме того, очень хорошее согласие было достигнуто путем сравнения UVPFR с AOD на длинах волн UVB, полученными с помощью спектрофотометра Брюера, который ранее был откалиброван по UVPFR. В основном из-за неинструментальных погрешностей, связанных с оптической толщиной озона, общая погрешность AOD в UVB выше, чем сообщаемая приборами AOD, измеряющими в UVA и видимом диапазонах.Однако точность может быть высокой среди инструментов, использующих согласованные алгоритмы для озона и оптической глубины Рэлея, а также для условий воздушных масс. За 4 месяца сравнительных измерений с UVPFR и Брюером среднеквадратичные различия АОТ были обнаружены <0,01 на всех длинах волн Брюера 306–320 нм.
.